
Is This the Future of Golf Equipment Fitting, or Just Plain Lazy?
A recently published patent application discloses a pretty interesting fitting concept, plus I just love the image of the golfing robot. The patent application published this month as US Pub. No. 20140074425 titled “System for Remotely Swinging a Golf Club,” which describes the invention as:
A method, system, and computer program product for remote golf club swinging is provided. The method can include receiving in a robotic golf club swing fixture from a remote operator over a computer communications network a set of swing parameters defining different aspects of a golf club swing. The method also can include directing a plurality of robotic arms of the fixture to swing a coupled golf club according to the received swing parameters. The method yet further can include sensing a result of the swinging of the coupled golf club. Finally, the method can include transmitting data derived from the sensed result to the remote operator over the computer communications network.
The application goes on to explain:
[0004] Golf is a difficult game that to master requires practice and skill. There is a high degree of interest in the game from golfers, but non-golfers as well find challenges such as trying to make a “hole-in-one” or attempting to hit the longest drive, off a golf tee, of interest. In order to experience these activities, a person must travel to a golf course, driving range, or golf simulator and use golf equipment to strike the ball.
[0005] Further, golf is a sport where the correct equipment is essential to the success and enjoyment of the activity. There are many different makes and models of golf equipment, including golf clubs. Each golf club manufacturer may make the same type of club slightly differently. For example, one manufacturer may produce a golf club with a shaft made from steel, while another equipment manufacturer may use graphite for the shaft. Testing a particular golf club or set of clubs helps to ensure a club is the correct size and weight for an individual player in addition to offering the right design characteristics for the player.
[0006] To test a golf club, a player has to travel to a hitting area, whether at a store, at a driving range, or use a golf simulator to play-test the club by striking golf balls. This, however, can be difficult and undesirable in an age of Internet shopping from the comfort of one’s own home. Further, in order to play-test a golf club appropriately, a player should test in the same environment for each type of club. For example, if a player is testing woods, he/she should play them off the same lie, using the same type of tee or play surface, in order to get an accurate comparison between the clubs. Testing can involve hitting for distance, accuracy, and/or control.
BRIEF SUMMARY OF THE INVENTION
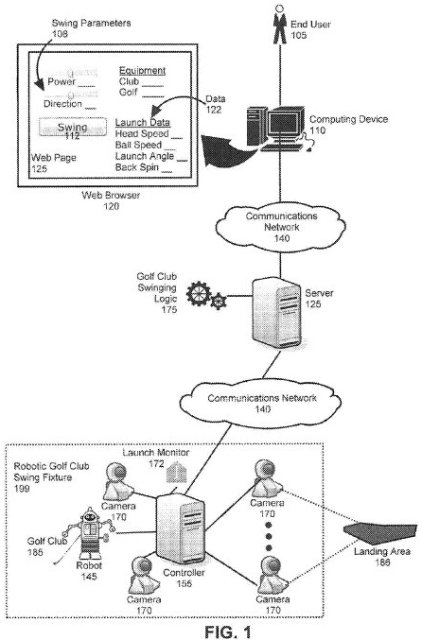
[0007] Embodiments of the present invention address deficiencies of the art in respect to remotely swinging golf clubs and provide a novel and non-obvious method, system, and computer program product for remotely swinging golf clubs. In an embodiment of the invention, a set of swing parameters from a remote operator can be received over a computer communications network. The swing parameters can define different aspects of a golf club swing. A plurality of robotic arms in a robotic golf club swing fixture can be directed to swing the attached golf club. A ball flight result of the swinging of the golf club can be sensed and the data derived from the sensed result can be transmitted to the remote operator over the computer communications network.
[0008] Another embodiment of the invention provides for a remote golf club swinging system. The system can include a server configured for communicative coupling to a web server and a computing device. A robotic golf club swing fixture also can be provided and can include a servo motor coupled to a controller, a data capture apparatus coupled to the controller, and a plurality of robotic arms attached to the servo motor. Each robotic arm can be coupled to a golf club. The remote golf club testing module can include program code for receiving from a remote operator over a computer communications network a set of swing parameters defining different aspects of a golf club swing, for directing a plurality of robotic arms of the fixture to swing a coupled golf club according to the received swing parameters, for sensing a result of the golf club, and for transmitting data derived from the sensed result to the remote operator over the computer communications network.
[0009] In another embodiment of the invention a remote golf club testing method can be provided. In an embodiment of the invention, a set of swing parameters from a remote operator can be received over a computer communications network. The swing parameters can define different aspects of a golf club swing. A plurality of robotic arms in a robotic golf club swing fixture can be directed to swing the attached golf club. Performance of the golf club can be sensed and the data derived from the performance can be transmitted to the remote operator over the computer communications network.
Interesting idea, but boy a purchaser would have to put a lot of faith in other people. Although, it is fun to imagine a line of 10 robots, each outfitted with a different driver; you take one swing, all 10 robots mimic your swing and hit a ball, and then you instantly get feedback on all 10 shots. Perhaps some day.
Dave Dawsey – The Golf Invention Lawyer
PS – If you like what we are doing, please considering helping us out and make your online gear purchases through our Amazon affiliate link. Every little purchase helps us keep the site up and running! Thanks.